File:Logi2c5T1000.jpg

{kind=link}
{kind=link}
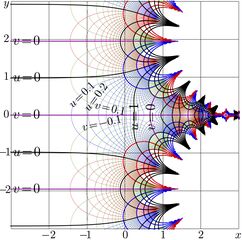
Complex map of function LogisticSequence with overcritic value of parameter,
- $ u\!+\!\mathrm i v= \mathrm{LogisticSequence}_{5}(x\!+\!\mathrm i y)$
The generators of the figure are copypasted below
C++ generator of map
#include <math.h>
#include <stdio.h>
#include <stdlib.h>
#define DB double
#define DO(x,y) for(x=0;x<y;x++)
#include <complex>
typedef std::complex<double> z_type;
#define Re(x) x.real()
#define Im(x) x.imag()
#define I z_type(0.,1.)
#include "conto.cin"
#include "efjh.cin"
/*
z_type arccos(z_type z){ return -I*log(z+I*sqrt(1.-z*z)); }
z_type coe(z_type z){ return .5*(1.-cos(exp((z+1.)/LQ))); }
z_type boe(z_type z){ return LQ*log(arccos(1.-2.*z))-1.; }
z_type doe(z_type z){ return coe(1.+boe(z));; }
*/
int main(){ int j,k,m,n; DB x,y, p,q, t; z_type z,c,d;
int M=201,M1=M+1;
int N=201,N1=N+1;
DB X[M1],Y[N1], g[M1*N1],f[M1*N1], w[M1*N1]; // w is working array.
char v[M1*N1]; // v is working array
FILE *o;o=fopen("logi2c5.eps","w");ado(o,124,124);
fprintf(o,"62 62 translate\n 20 20 scale\n");
DO(m,M1) X[m]=-3.+.03*(m-.5);
DO(n,N1) Y[n]=-3.+.03*(n-.5);
for(m=-3;m<4;m++){if(m==0){M(m,-3.04)L(m,3.04)} else{M(m,-3)L(m,3)}}
for(n=-3;n<4;n++){ M( -3 ,n)L(3,n)}
fprintf(o,".008 W 0 0 0 RGB S\n");
maq(5.);
DO(m,M1)DO(n,N1){g[m*N1+n]=9999; f[m*N1+n]=9999;}
DO(m,M1){x=X[m]; //printf("%5.2f\n",x);
DO(n,N1){y=Y[n]; z=z_type(x,y);
// c=E(H(z))-1.;
// c=F(1.+E(0.1*z));
c=F(z);
// c=F(.5+E(z));
// c=boe(z);
// c=.5*(1.-cos(exp((z+1.)/LQ)));
// d=H(F(z-1.));
// p=abs(c-d)/(abs(c)+abs(d)); p=-log(p)/log(10.)-1.;
// if(p>-4.9 && p<20) g[m*N1+n]=p;
p=Re(c);q=Im(c);
if(p>-49 && p<49) {g[m*N1+n]=p;}
if(q>-4.9 && q<4.9) {f[m*N1+n]=q;}
// if(q>-4.9 && q<4.9 && fabs(q)>1.e-11 ) {f[m*N1+n]=q;}
}}
fprintf(o,"1 setlinejoin 2 setlinecap\n");
//p=.8;q=.4;
p=4.;q=.5;
//#include"plof.cin"
for(m=-2;m<2;m++)
for(n=1;n<10;n+=1)conto(o,f,w,v,X,Y,M,N, (m+.1*n),-q, q);fprintf(o,".005 W 0 .6 0 RGB S\n");
for(m=0;m<2;m++)
for(n=1;n<10;n+=1)conto(o,g,w,v,X,Y,M,N,-(m+.1*n),-q, q);fprintf(o,".005 W .9 0 0 RGB S\n");
for(m=0;m<2;m++)
for(n=1;n<10;n+=1)conto(o,g,w,v,X,Y,M,N, (m+.1*n),-q, q);fprintf(o,".005 W 0 0 .9 RGB S\n");
for(m= 1;m<5;m++) conto(o,f,w,v,X,Y,M,N, (0.-m),-p,p); fprintf(o,".02 W .9 0 0 RGB S\n");
for(m= 1;m<5;m++) conto(o,f,w,v,X,Y,M,N, (0.+m),-p,p); fprintf(o,".02 W 0 0 .9 RGB S\n");
for(m=-4;m<5;m++) conto(o,g,w,v,X,Y,M,N, (0.+m),-p,p); fprintf(o,".02 W 0 0 0 RGB S\n");
conto(o,f,w,v,X,Y,M,N, (0. ),-p,p); fprintf(o,".02 W .6 0 .6 RGB S\n");
fprintf(o,"showpage\n%c%cTrailer",'%','%'); fclose(o);
system("epstopdf logi2c5.eps"); // for linux
system( "open logi2c5.pdf"); // for mac
getchar(); system("killall Preview");
}
Latex generator of map
\documentclass[12pt]{article}
\usepackage{geometry}
\usepackage{graphics}
\usepackage{rotating}
\paperwidth 128pt
\paperheight 127pt
\topmargin -104pt
\oddsidemargin -90pt
\newcommand \sx {\scalebox}
\newcommand \ing \includegraphics
\newcommand \rot {\begin{rotate}}
\newcommand \ero {\end{rotate}}
\begin{document}
\newcommand \axes {
\put( 2,124){\sx{.5}{$y$}}
\put( 2,105){\sx{.5}{$2$}}
\put( 2,85){\sx{.5}{$1$}}
\put( 2, 65){\sx{.5}{$0$}}
\put(-.8, 45){\sx{.5}{$-\!1$}}
\put(-.8, 25){\sx{.5}{$-\!2$}}
\put( 22, 1){\sx{.5}{$-2$}}
\put( 42, 1){\sx{.5}{$-\!1$}}
\put( 65, 1){\sx{.5}{$0$}}
\put( 85, 1){\sx{.5}{$1$}}
\put(105, 1){\sx{.5}{$2$}}
\put(124.6, 1){\sx{.5}{$x$}}
}
\begin{picture}(122,122) \put( 4, 4){\ing{logi2c5}}
\put(7,103.6){\rot{ 0.}\sx{.6}{$v\!=\!0$}\ero}
\put(7, 84.2){\rot{ 0.}\sx{.6}{$u\!=\!0$}\ero}
\put(7, 64.5){\rot{ 0.}\sx{.6}{$v\!=\!0$}\ero}
\put(7, 44.6){\rot{ 0.}\sx{.6}{$u\!=\!0$}\ero}
\put(7, 25.2){\rot{ 0.}\sx{.6}{$v\!=\!0$}\ero}
\put(38.6,70){\rot{44}\sx{.5}{$u\!=\!0.1$}\ero}
\put(47.2,68){\rot{53}\sx{.5}{$u\!=\!0.2$}\ero}
\put(50,70){\rot{-13}\sx{.5}{$v\!=\!0.1$}\ero}
\put(44,58){\rot{12}\sx{.5}{$v\!=\!-0.1$}\ero}
%
\put(73.2, 58){\rot{ 90.}\sx{.6}{$u\!=\!1$}\ero}
\put(82, 58){\rot{ 90.}\sx{.6}{$v\!=\!0$}\ero}
\axes
\end{picture}
\end{document}
References
http://mizugadro.mydns.jp/PAPERS/2010logistie.pdf D.Kouznetsov. Holomorphic extension of the logistic sequence. Moscow University Physics Bulletin, 2010, No.2, p.91-98. (Russian version: p.24-31)
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 06:13, 1 December 2018 | | 1,771 × 1,757 (968 KB) | Maintenance script (talk | contribs) | Importing image file |
- You cannot overwrite this file.
File usage
There are no pages that link to this file.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}