Difference between revisions of "File:LogiarcT300.png"
(Importing image file) |
|||
| Line 1: | Line 1: | ||
| + | [[Explicit plot]] of function [[ArcLogisticSequence]]$_s(x)$ versus $x$ for various values of parameter $s$. |
||
| − | Importing image file |
||
| + | |||
| + | The singularities ([[branch point.]]s) are marked with black circles. |
||
| + | |||
| + | ==C++ generator of curves== |
||
| + | // Files [[efjh.cin]] and [[ado.cin]] should be loaded in the working directory in order to compile the [[C++]] code below. |
||
| + | |||
| + | #include <math.h> |
||
| + | #include <stdio.h> |
||
| + | #include <stdlib.h> |
||
| + | #define DB double |
||
| + | #define DO(x,y) for(x=0;x<y;x++) |
||
| + | using namespace std; |
||
| + | #include <complex> |
||
| + | typedef complex<double> z_type; |
||
| + | #define Re(x) x.real() |
||
| + | #define Im(x) x.imag() |
||
| + | #define I z_type(0.,1.) |
||
| + | #include "ado.cin" |
||
| + | #include "efjh.cin" |
||
| + | main(){ int j,k,m,n; DB x0,y0,x,y, p,q, t; z_type z,c,d; |
||
| + | FILE *o;o=fopen("logiarc.eps","w");ado(o,150,340); |
||
| + | fprintf(o,"20 220 translate\n 100 100 scale\n"); |
||
| + | #define M(x,y) fprintf(o,"%6.3f %6.3f M\n",0.+x,0.+y); |
||
| + | #define L(x,y) fprintf(o,"%6.3f %6.3f L\n",0.+x,0.+y); |
||
| + | fprintf(o,"1 setlinejoin 2 setlinecap\n"); |
||
| + | for(m=0;m<2;m++){if(m==0){M(m,-2.04)L(m,1.06)} else{M(m,-2)L(m,1)}} |
||
| + | for(n=-2;n<2;n++){if(n==0){M(-.06,n)L(1.2,n)} else{M(0,n)L(1,n)}} |
||
| + | fprintf(o,".004 W 0 0 0 RGB S\n"); |
||
| + | fprintf(o,"1 setlinejoin 1 setlinecap\n"); |
||
| + | maq(5.); |
||
| + | x0=5./4.; y0=Re(E(x0)); |
||
| + | fprintf(o,"%6.4f %6.4f .02 0 360 arc C S\n newpath\n",x0,y0); |
||
| + | M(x0,y0); |
||
| + | printf("%4.2f %8.6f %8.6f\n",Q,x,y); |
||
| + | DO(m,1250) { x=x0-.001*m; z=E(x); y=Re(z); L(x,y); if( y<-2.01) break; } |
||
| + | fprintf(o,".007 W 0 0 0 RGB S\n"); |
||
| + | maq(4.); |
||
| + | x0=1; y0=Re(E(x0)); |
||
| + | fprintf(o,"%6.4f %6.4f .02 0 360 arc C S\n newpath\n",x0,y0); |
||
| + | M(x0,y0); |
||
| + | DO(m,1000) { x=x0-.001*m; z=E(x); y=Re(z); L(x,y) if(y<-2.01) break; } |
||
| + | printf("%4.2f %8.6f %8.6f\n",Q,x,y); |
||
| + | fprintf(o,".02 W 1 0 1 RGB S\n"); |
||
| + | maq(3.4); |
||
| + | x0=3.4/4.; y0=Re(E(x0)); |
||
| + | fprintf(o,"0 0 0 RGB .01 W %6.4f %6.4f .02 0 360 arc C S\n newpath\n",x0,y0); |
||
| + | M(x0,y0); |
||
| + | DO(m,790) { x=x0-.001*m; z=E(x); y=Re(z); L(x,y); if(y<-2.01) break; } |
||
| + | printf("%4.2f %8.6f %8.6f\n",Q,x0,y0); |
||
| + | fprintf(o,".02 W 0 .7 0 RGB S\n"); |
||
| + | maq(3.); |
||
| + | x0=3./4.; y0=Re(E(x0)); |
||
| + | fprintf(o,"0 0 0 RGB .01 W %6.4f %6.4f .02 0 360 arc C S\n newpath\n",x0,y0); |
||
| + | M(x0,y0); |
||
| + | DO(m,790) { x=x0-.001*m; z=E(x); y=Re(z); L(x,y); if(y<-2.01) break; } |
||
| + | printf("%4.2f %8.6f %8.6f\n",Q,x0,y0); |
||
| + | fprintf(o,".015 W 1 0 0 RGB [.03 .04] 1 setdash S\n"); |
||
| + | fprintf(o,"1 setlinejoin 1 setlinecap\n"); |
||
| + | maq(3.8); |
||
| + | x0=3.8/4.; y0=Re(E(x0)); |
||
| + | fprintf(o,"0 0 0 RGB .01 W [1 0] 0 setdash %6.4f %6.4f .02 0 360 arc C S\n newpath\n",x0,y0); |
||
| + | M(x0,y0); |
||
| + | DO(m,890) { x=x0-.001*m; z=E(x); y=Re(z); L(x,y); if(y<-2.01) break; } |
||
| + | printf("%4.2f %8.6f %8.6f\n",Q,x0,y0); |
||
| + | fprintf(o,".015 W 0 0 1 RGB [.001 .025] 0 setdash S\n"); |
||
| + | fprintf(o,"showpage\n%c%cTrailer",'%','%'); fclose(o); |
||
| + | system("epstopdf logiarc.eps"); |
||
| + | system( "open logiarc.pdf"); |
||
| + | getchar(); system("killall Preview"); |
||
| + | } |
||
| + | |||
| + | |||
| + | ==Latex generator of labels== |
||
| + | % File [[logiarc.pdf]] should be generated with the code above in order to compile the [[Latex]] document below. |
||
| + | |||
| + | %<nowiki> %<br> |
||
| + | |||
| + | \documentclass[12pt]{article} %<br> |
||
| + | \usepackage{geometry} %<br> |
||
| + | \usepackage{graphics} %<br> |
||
| + | \usepackage{rotating} %<br> |
||
| + | \paperwidth 144pt %<br> |
||
| + | \paperheight 310pt %<br> |
||
| + | \topmargin -107pt %<br> |
||
| + | \oddsidemargin -94pt %<br> |
||
| + | \newcommand \sx {\scalebox} %<br> |
||
| + | \newcommand \ing \includegraphics %<br> |
||
| + | \newcommand \rot {\begin{rotate}} %<br> |
||
| + | \newcommand \ero {\end{rotate}} %<br> |
||
| + | \begin{document} %<br> |
||
| + | \begin{picture}(168,323) %<br> |
||
| + | \put(0,0){\includegraphics{logiarc}} %<br> |
||
| + | \put(10,314){\sx{1.4}{$1$}} %<br> |
||
| + | \put(0,115){\sx{1.4}{$-\!1$}} %<br> |
||
| + | \put(0,16){\sx{1.4}{$-\!2$}} %<br> |
||
| + | \put(16.2,207){\sx{1.5}{$0$}} %<br> |
||
| + | \put(116.2,207){\sx{1.5}{$1$}} %<br> |
||
| + | \put(138,207){\sx{1.5}{$x$}} %<br> |
||
| + | \put( 89,254){\sx{1.}{\rot{78}$s\!=\!3$\ero}} %<br> |
||
| + | \put(100,252){\sx{1.}{\rot{73}$s\!=\!3.4$\ero}} %<br> |
||
| + | \put(107,251){\sx{1.}{\rot{68}$s\!=\!3.8$\ero}} %<br> |
||
| + | \put(118,251){\sx{1.1}{\rot{65}$s\!=\!4$\ero}} %<br> |
||
| + | \put(131,243){\sx{1.1}{\rot{51}$s\!=\!5$\ero}} %<br> |
||
| + | \end{picture} %<br> |
||
| + | \end{document} %<br> |
||
| + | |||
| + | %</nowiki> %<br> |
||
| + | |||
| + | ==References== |
||
| + | <references/> |
||
| + | |||
| + | [[Category:ArcLogisticSequence]] |
||
| + | [[Category:LogisticSequence]] |
||
| + | [[Category:Abel function]] |
||
| + | [[Category:Superfunction]] |
||
| + | [[Category:LogisticOperator]] |
||
| + | [[Category:C++]] |
||
| + | [[Category:Latex]] |
||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Latest revision as of 09:43, 21 June 2013
Explicit plot of function ArcLogisticSequence$_s(x)$ versus $x$ for various values of parameter $s$.
The singularities (branch point.s) are marked with black circles.
C++ generator of curves
// Files efjh.cin and ado.cin should be loaded in the working directory in order to compile the C++ code below.
#include <math.h>
#include <stdio.h>
#include <stdlib.h>
#define DB double
#define DO(x,y) for(x=0;x<y;x++)
using namespace std;
#include <complex>
typedef complex<double> z_type;
#define Re(x) x.real()
#define Im(x) x.imag()
#define I z_type(0.,1.)
#include "ado.cin"
#include "efjh.cin"
main(){ int j,k,m,n; DB x0,y0,x,y, p,q, t; z_type z,c,d;
FILE *o;o=fopen("logiarc.eps","w");ado(o,150,340);
fprintf(o,"20 220 translate\n 100 100 scale\n");
#define M(x,y) fprintf(o,"%6.3f %6.3f M\n",0.+x,0.+y);
#define L(x,y) fprintf(o,"%6.3f %6.3f L\n",0.+x,0.+y);
fprintf(o,"1 setlinejoin 2 setlinecap\n");
for(m=0;m<2;m++){if(m==0){M(m,-2.04)L(m,1.06)} else{M(m,-2)L(m,1)}}
for(n=-2;n<2;n++){if(n==0){M(-.06,n)L(1.2,n)} else{M(0,n)L(1,n)}}
fprintf(o,".004 W 0 0 0 RGB S\n");
fprintf(o,"1 setlinejoin 1 setlinecap\n");
maq(5.);
x0=5./4.; y0=Re(E(x0));
fprintf(o,"%6.4f %6.4f .02 0 360 arc C S\n newpath\n",x0,y0);
M(x0,y0);
printf("%4.2f %8.6f %8.6f\n",Q,x,y);
DO(m,1250) { x=x0-.001*m; z=E(x); y=Re(z); L(x,y); if( y<-2.01) break; }
fprintf(o,".007 W 0 0 0 RGB S\n");
maq(4.);
x0=1; y0=Re(E(x0));
fprintf(o,"%6.4f %6.4f .02 0 360 arc C S\n newpath\n",x0,y0);
M(x0,y0);
DO(m,1000) { x=x0-.001*m; z=E(x); y=Re(z); L(x,y) if(y<-2.01) break; }
printf("%4.2f %8.6f %8.6f\n",Q,x,y);
fprintf(o,".02 W 1 0 1 RGB S\n");
maq(3.4);
x0=3.4/4.; y0=Re(E(x0));
fprintf(o,"0 0 0 RGB .01 W %6.4f %6.4f .02 0 360 arc C S\n newpath\n",x0,y0);
M(x0,y0);
DO(m,790) { x=x0-.001*m; z=E(x); y=Re(z); L(x,y); if(y<-2.01) break; }
printf("%4.2f %8.6f %8.6f\n",Q,x0,y0);
fprintf(o,".02 W 0 .7 0 RGB S\n");
maq(3.);
x0=3./4.; y0=Re(E(x0));
fprintf(o,"0 0 0 RGB .01 W %6.4f %6.4f .02 0 360 arc C S\n newpath\n",x0,y0);
M(x0,y0);
DO(m,790) { x=x0-.001*m; z=E(x); y=Re(z); L(x,y); if(y<-2.01) break; }
printf("%4.2f %8.6f %8.6f\n",Q,x0,y0);
fprintf(o,".015 W 1 0 0 RGB [.03 .04] 1 setdash S\n");
fprintf(o,"1 setlinejoin 1 setlinecap\n");
maq(3.8);
x0=3.8/4.; y0=Re(E(x0));
fprintf(o,"0 0 0 RGB .01 W [1 0] 0 setdash %6.4f %6.4f .02 0 360 arc C S\n newpath\n",x0,y0);
M(x0,y0);
DO(m,890) { x=x0-.001*m; z=E(x); y=Re(z); L(x,y); if(y<-2.01) break; }
printf("%4.2f %8.6f %8.6f\n",Q,x0,y0);
fprintf(o,".015 W 0 0 1 RGB [.001 .025] 0 setdash S\n");
fprintf(o,"showpage\n%c%cTrailer",'%','%'); fclose(o);
system("epstopdf logiarc.eps");
system( "open logiarc.pdf");
getchar(); system("killall Preview");
}
Latex generator of labels
% File logiarc.pdf should be generated with the code above in order to compile the Latex document below.
% %<br>
\documentclass[12pt]{article} %<br>
\usepackage{geometry} %<br>
\usepackage{graphics} %<br>
\usepackage{rotating} %<br>
\paperwidth 144pt %<br>
\paperheight 310pt %<br>
\topmargin -107pt %<br>
\oddsidemargin -94pt %<br>
\newcommand \sx {\scalebox} %<br>
\newcommand \ing \includegraphics %<br>
\newcommand \rot {\begin{rotate}} %<br>
\newcommand \ero {\end{rotate}} %<br>
\begin{document} %<br>
\begin{picture}(168,323) %<br>
\put(0,0){\includegraphics{logiarc}} %<br>
\put(10,314){\sx{1.4}{$1$}} %<br>
\put(0,115){\sx{1.4}{$-\!1$}} %<br>
\put(0,16){\sx{1.4}{$-\!2$}} %<br>
\put(16.2,207){\sx{1.5}{$0$}} %<br>
\put(116.2,207){\sx{1.5}{$1$}} %<br>
\put(138,207){\sx{1.5}{$x$}} %<br>
\put( 89,254){\sx{1.}{\rot{78}$s\!=\!3$\ero}} %<br>
\put(100,252){\sx{1.}{\rot{73}$s\!=\!3.4$\ero}} %<br>
\put(107,251){\sx{1.}{\rot{68}$s\!=\!3.8$\ero}} %<br>
\put(118,251){\sx{1.1}{\rot{65}$s\!=\!4$\ero}} %<br>
\put(131,243){\sx{1.1}{\rot{51}$s\!=\!5$\ero}} %<br>
\end{picture} %<br>
\end{document} %<br>
% %
References
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 17:50, 20 June 2013 | 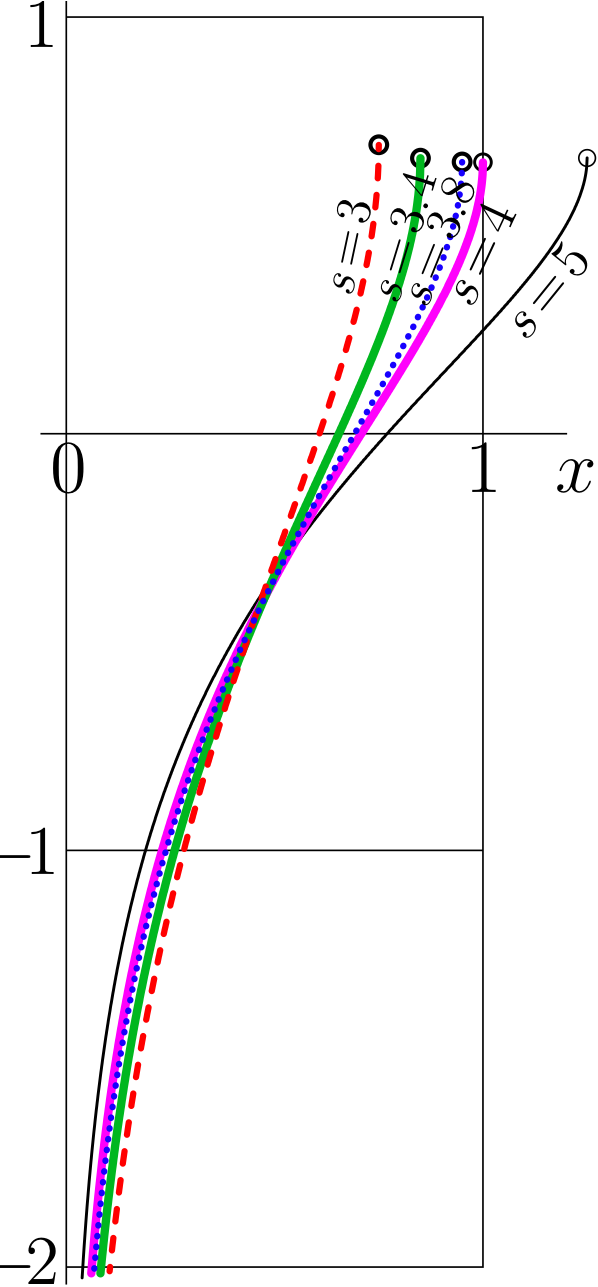 | 598 × 1,287 (90 KB) | Maintenance script (talk | contribs) | Importing image file |
- You cannot overwrite this file.
File usage
The following 2 pages link to this file:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}